我们使用jetson一般就是通过ssh连接,但是有些场景还是有桌面环境比较方便,比如摄像头相关的,这时候使用VNC就比较方便。一般可视化界面也是为了视觉相关的任务,对于外接摄像头,jetson支持usb摄像头和CSI摄像头。这篇我们先讲配置usb摄像头以及在docker内使用usb摄像头,后面会给大家分享CSI摄像头的使用方法。 一、jetsonVNC配置 使用VNC需要jetson插着显示器的输出接口,或者买个HDMIdummyplug也可以,用来骗jetson自己插着桌面输出显示。 安装VN...

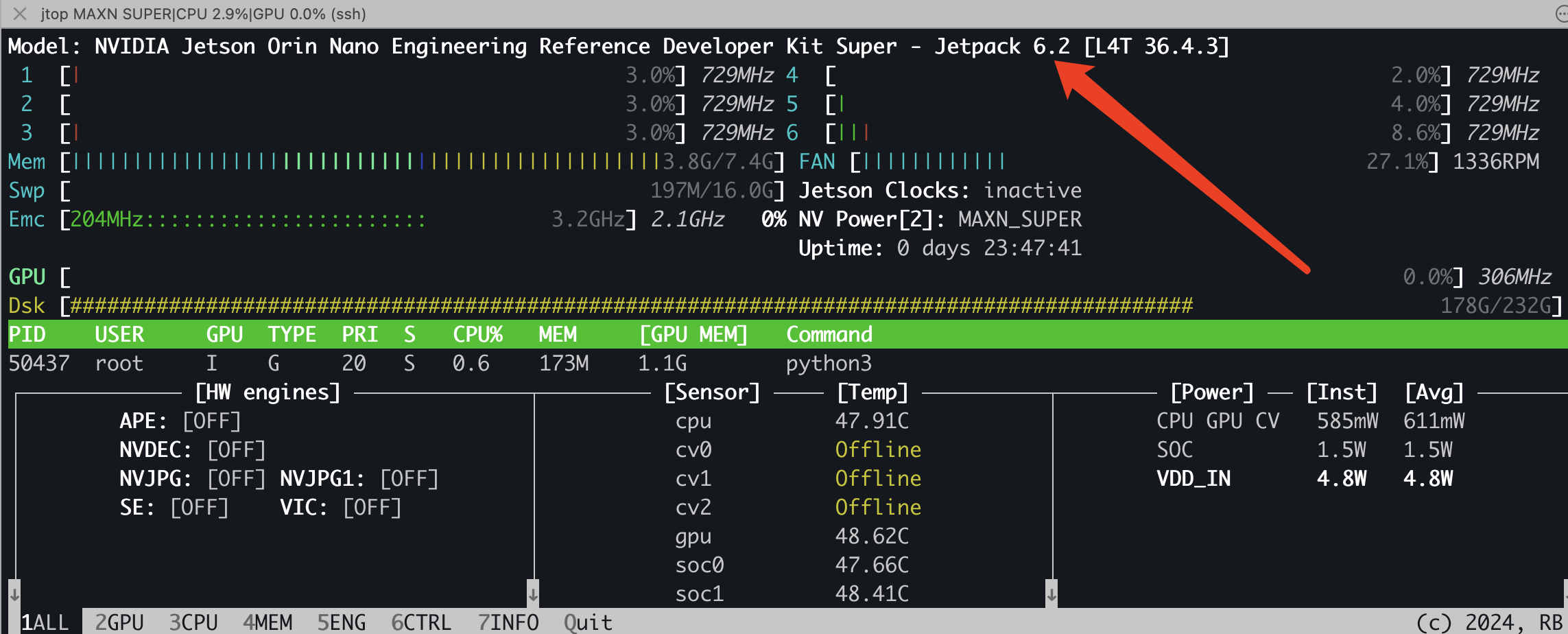
对于产品发布来说,最合适的环境配置方式是使用docker,产品和环境可以一起发布,用户会得到最好的使用体验。jetsonorinnanosuper的AIdocker环境配置有两个难点: (1)CPU是arm架构(2)super要使用jetpack6.2[L4T36.4.3]版本,因为版本太新,这个版本很多开源项目还没有发布对应的dockerimage,大部分的dockerimage都是基于jetpack5.x构建的。 下面介绍一下我自己使用的包含pytorch和tensorrt(C、python...
版权与免责声明 本平台(包括E-BotHub网站、相关客户端、自媒体运营平台及其他主要运营渠道,以下统称“本平台”)是由北京亦庄机器人科技产业发展有限公司运营的机器人二次开发者社区与产业赋能平台,专注于为机器人及具身智能领域的专业技术人员和开发者,提供专业化、集成化的机器人开发与产业对接服务。本版权与免责声明旨在保障本平台的正常运营、保护用户及合作伙伴的合法权益,其初衷是为了向所有生态参与者提供持续、优质、安全的服务。本平台一贯尊重并致力于保护知识产权,建议您在享用本平台服务前,仔细阅读并理解本...
各位开发者,大家好: 欢迎来到E-BotHub未来机域。 这封信想和大家坦诚地聊聊我们正在做的事,以及我们为何需要彼此。 我们是一个由北京亦庄机器人科技产业发展有限公司运营的机器人二次开发者社区。我们的目标很明确:把做机器人不同环节的人聚在一起,让好的技术能找到用的地方,让真实的需求能找到合适的开发者,让开发产品能更快地走通从想法到落地的路。 为什么需要大家聚在一起? 因为机器人开发很难靠单点完成。它需要技术、场景、产品和商业的闭环。简单来说: 高校/学术开发者和青年科学家/技术骨干,擅长攻克前...
文章来源:[https://www.guyuehome.com/detail?id=1992940596131557377](https://www.guyuehome.com/detail?id=1992940596131557377) 1.引言:具身智能时代的空间推理挑战 视觉-语言-导航(Vision-and-LanguageNavigation,VLN)作为具身人工智能领域的核心研究方向,旨在构建能够理解自然语言指令并在真实三维环境中自主导航的智能体。这一任务的复杂性在于需要同时整合视觉...
文章来源:[https://www.guyuehome.com/detail?id=1992603503773642753](https://www.guyuehome.com/detail?id=1992603503773642753) 摘要 随着大型语言模型(LargeLanguageModels,LLM)在自然语言理解与推理上的突破,与机器人系统的交互方式正在发生深刻改变。本文介绍一种基于语言模型程序(LanguageModelPrograms,LMP)的创新框架,实现了从自然语言指令到机...
文章来源:[https://www.guyuehome.com/detail?id=1969022682768896001](https://www.guyuehome.com/detail?id=1969022682768896001) 1.引言 在机器人学习领域,如何让机器人具备类似人类的"预测未来"能力一直是一个核心挑战。人类在执行任务时,大脑会不断预测下一步的行动结果,这种"世界模型"帮助我们做出更好的决策。2025年9月15日,宇树科技正式开源了UnifoLM-WMA-0框架,这是一个...
文章来源:[https://www.guyuehome.com/detail?id=1929555287440687105](https://www.guyuehome.com/detail?id=1929555287440687105) 1.简介 在这个数字化和智能化日益加速的时代,机器人技术正在逐渐改变我们的生活方式。[DRL-robot-navigation](https://github.com/reiniscimurs/DRL-robot-navigation)是一个非常不错的入门开源...
文章来源:[https://www.guyuehome.com/detail?id=1938233439339741186](https://www.guyuehome.com/detail?id=1938233439339741186) 摘要 LeRobot作为HuggingFace贡献的开源机器人学习框架,凭借其PyTorch内核、对模仿学习(IL)和强化学习(RL)的专注,以及与现实世界机器人应用的紧密联系,正迅速成为机器人学界和产业界关注的焦点。本文旨在全面、深入地剖析LeRobot框架...
文章来源:[https://www.guyuehome.com/detail?id=1961787754222276610](https://www.guyuehome.com/detail?id=1961787754222276610) 一、引言 强化学习(ReinforcementLearning,RL)作为机器学习的一个重要分支,近年来在解决复杂决策问题方面展现出巨大潜力。与监督学习和无监督学习不同,强化学习模拟了人类学习的过程:通过与环境交互,根据获得的奖励信号调整行为策略。在机器人控制...