活动背景 12月4日,由未来机域主办的系列深度直播《等待具身智能数据的ChatGPT时刻之破局》邀请上海开普勒探索机器人有限公司中国业务负责人张梅魁与北京人形创新中心多模态大模型研究员代勇作为主讲嘉宾,围绕具身智能在高质量数据采集、工业场景落地、标准体系构建及生态协同发展等核心议题展开深度对话。 落地为王:以场景为导向 在具身智能从实验室走向工厂车间的过程中,工业场景被视为最具商业确定性的突破口。与大众关心何时能实现通用智能、泛化性不同,张梅魁在场景落地中发现,当前机器人在工业领域的核心挑战并非...


我们基于tensorrt-cpp-api这个仓库介绍。这个仓库的代码是一个非常不错的tensorrt的cppapi实现,可基于此开发自己的项目。 我们从src/main.cpp开始按顺序说明。 一、首先是声明我们创建tensorrtmodel的参数。 //SpecifyourGPUinferenceconfigurationoptions Optionsoptions; //Specifywhatprecisiontouseforinference //FP16isapproximatelytwiceasfastasFP32. options.precision=Precision::F...
先看一下基本效果:  可实现usb摄像头实时的进行检测,对于中等的yolov10s模型,FPS在8左右。跑的是tensorrtfp16模型。 可视化界面如图: 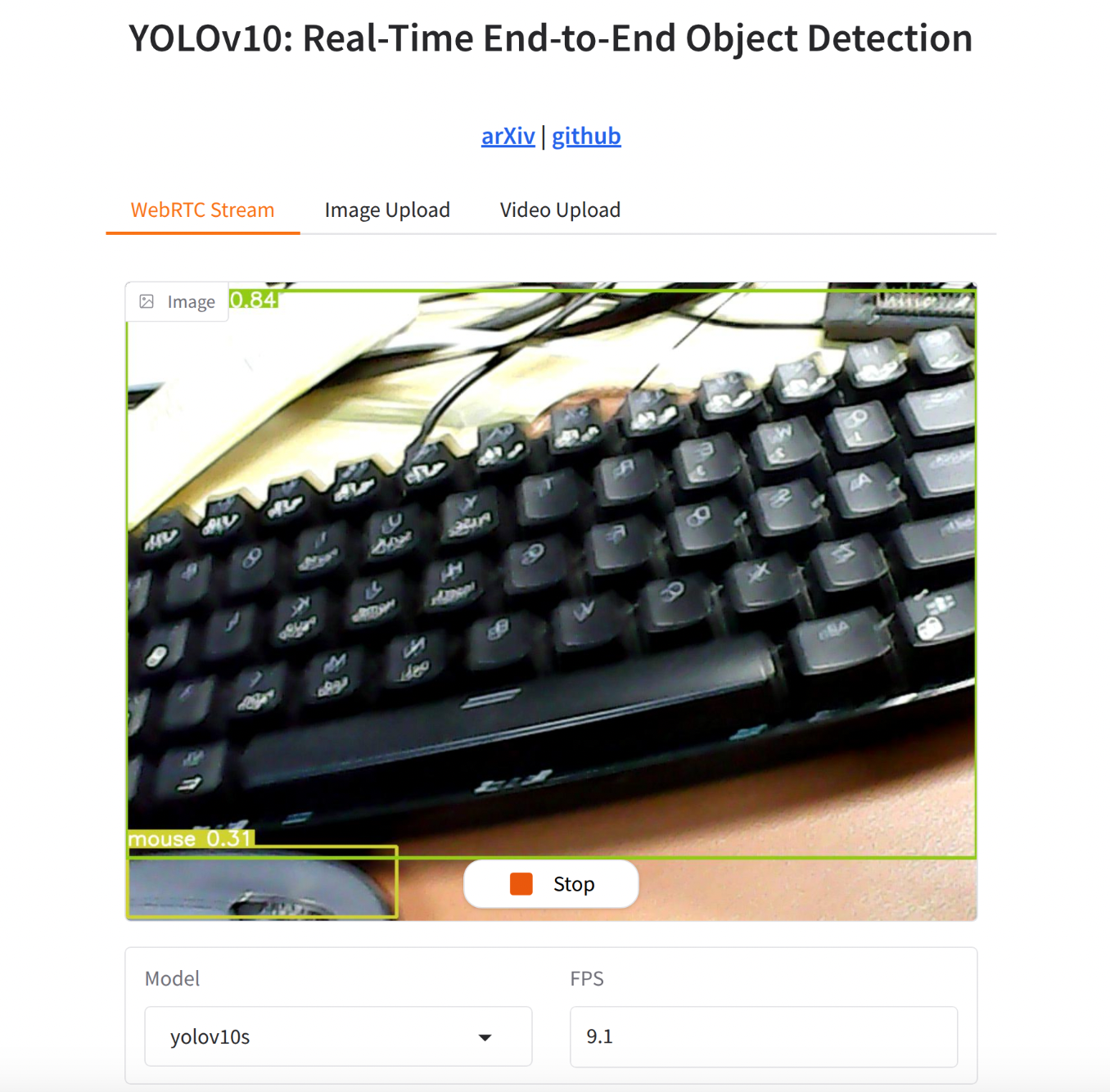 如果觉着下面的配置过程繁琐,也可以直接跳到第四部分,有开箱即用的方法。 一、环境配置和usb摄像头配置 参考之前发布...

先看一下部署完成后的效果。可以直接在手机上访问jetson,有web界面供使用。 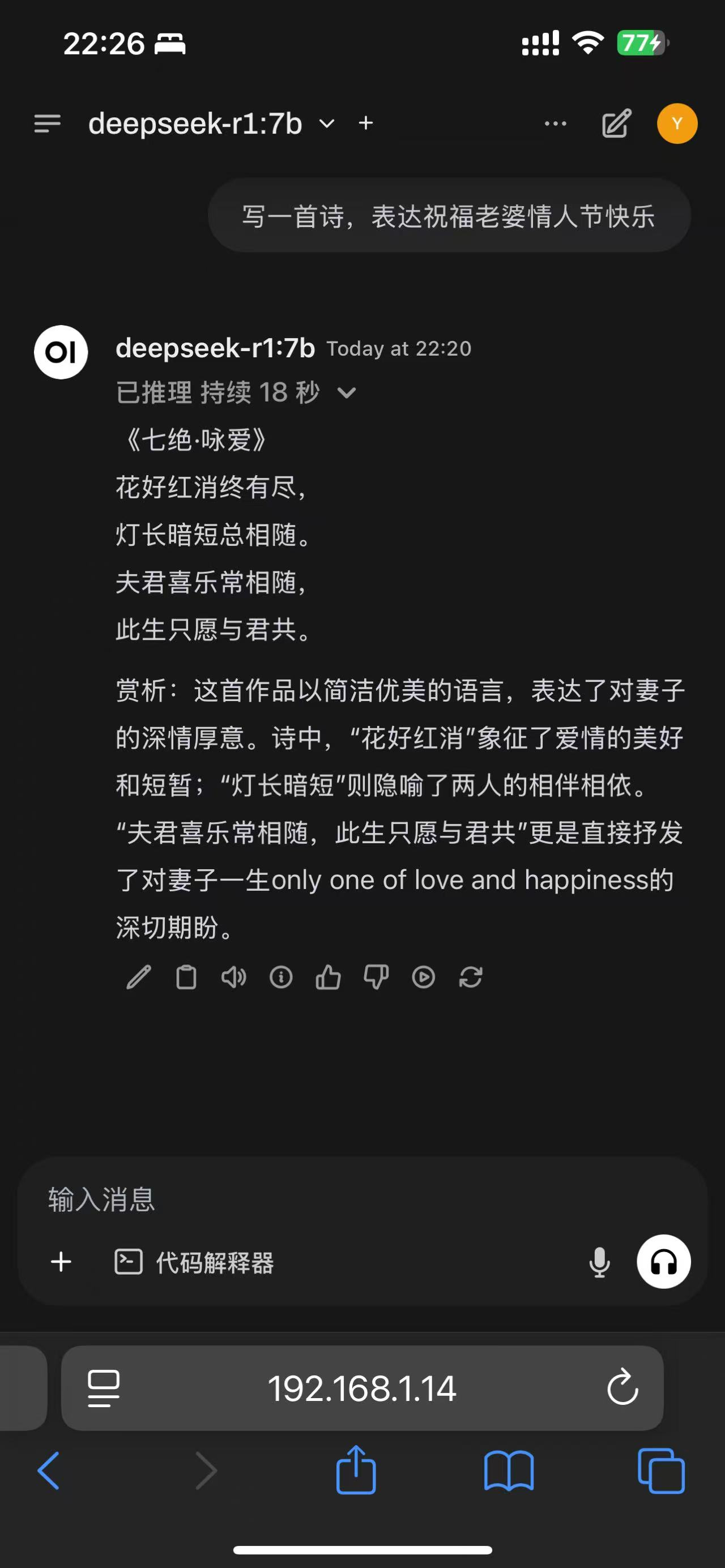 也可以直接在电脑上访问。  我这个是8GB128-bitLPDDR5102GB/s版本,256g硬盘。先看一下基本参数。 
我们使用jetson一般就是通过ssh连接,但是有些场景还是有桌面环境比较方便,比如摄像头相关的,这时候使用VNC就比较方便。一般可视化界面也是为了视觉相关的任务,对于外接摄像头,jetson支持usb摄像头和CSI摄像头。这篇我们先讲配置usb摄像头以及在docker内使用usb摄像头,后面会给大家分享CSI摄像头的使用方法。 一、jetsonVNC配置 使用VNC需要jetson插着显示器的输出接口,或者买个HDMIdummyplug也可以,用来骗jetson自己插着桌面输出显示。 安装...
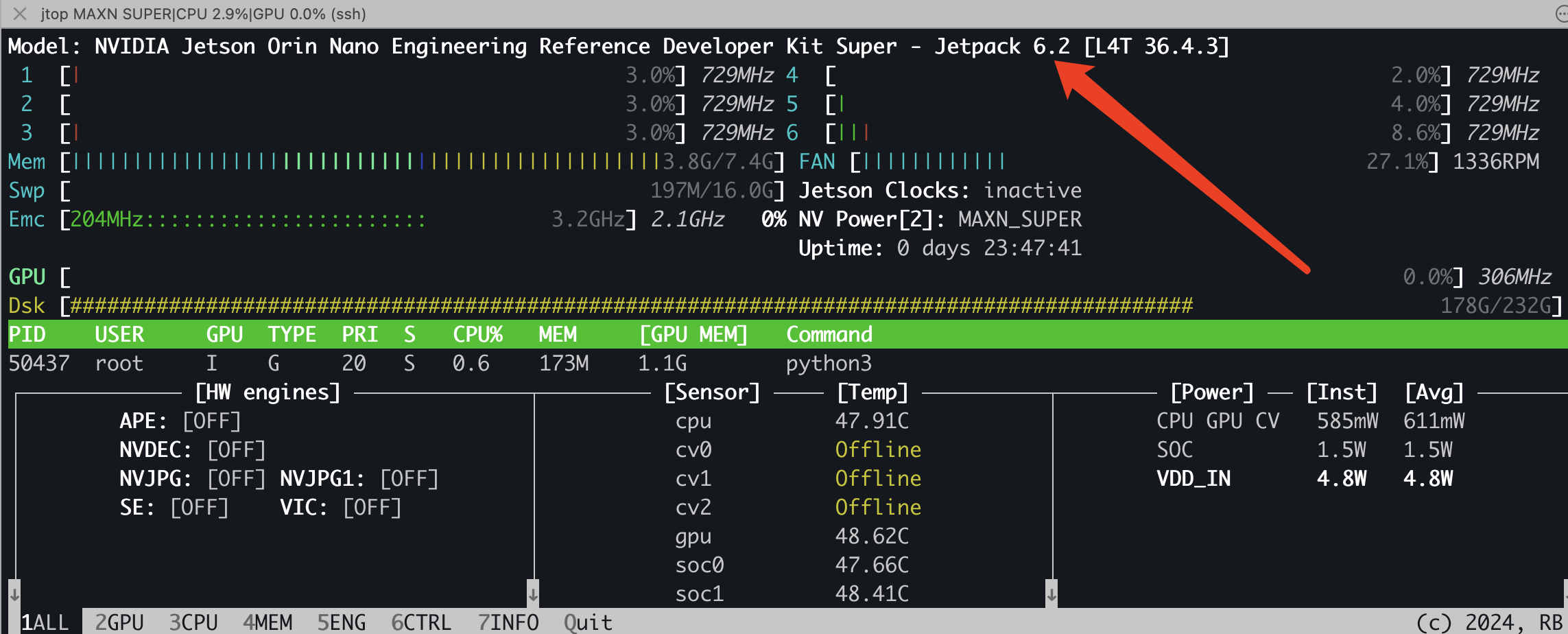
对于产品发布来说,最合适的环境配置方式是使用docker,产品和环境可以一起发布,用户会得到最好的使用体验。jetsonorinnanosuper的AIdocker环境配置有两个难点: (1)CPU是arm架构(2)super要使用jetpack6.2[L4T36.4.3]版本,因为版本太新,这个版本很多开源项目还没有发布对应的dockerimage,大部分的dockerimage都是基于jetpack5.x构建的。 下面介绍一下我自己使用的包含pytorch和tensorrt(C、pyth...
文章来源:[https://www.guyuehome.com/detail?id=1992940596131557377](https://www.guyuehome.com/detail?id=1992940596131557377) 1.引言:具身智能时代的空间推理挑战 视觉-语言-导航(Vision-and-LanguageNavigation,VLN)作为具身人工智能领域的核心研究方向,旨在构建能够理解自然语言指令并在真实三维环境中自主导航的智能体。这一任务的复杂性在于需要同时整合视觉...
文章来源:[https://www.guyuehome.com/detail?id=1992603503773642753](https://www.guyuehome.com/detail?id=1992603503773642753) 摘要 随着大型语言模型(LargeLanguageModels,LLM)在自然语言理解与推理上的突破,与机器人系统的交互方式正在发生深刻改变。本文介绍一种基于语言模型程序(LanguageModelPrograms,LMP)的创新框架,实现了从自然语言指令到机...
文章来源:[https://www.guyuehome.com/detail?id=1969022682768896001](https://www.guyuehome.com/detail?id=1969022682768896001) 1.引言 在机器人学习领域,如何让机器人具备类似人类的"预测未来"能力一直是一个核心挑战。人类在执行任务时,大脑会不断预测下一步的行动结果,这种"世界模型"帮助我们做出更好的决策。2025年9月15日,宇树科技正式开源了UnifoLM-WMA-0框架,这是一个...
文章来源:[https://www.guyuehome.com/detail?id=1929555287440687105](https://www.guyuehome.com/detail?id=1929555287440687105) 1.简介 在这个数字化和智能化日益加速的时代,机器人技术正在逐渐改变我们的生活方式。[DRL-robot-navigation](https://github.com/reiniscimurs/DRL-robot-navigation)是一个非常不错的入门开源...