

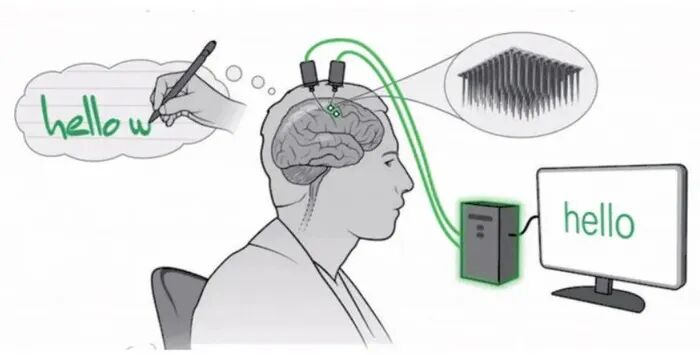
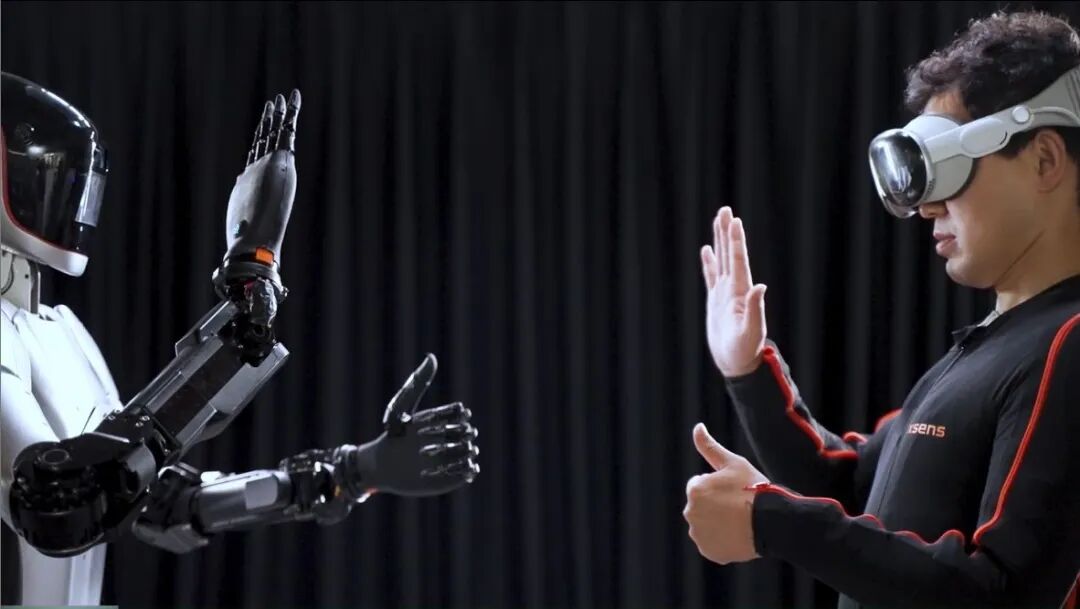
当一台机器人看到水杯滑落,是先调用模型识别“这是玻璃制品”,再规划抓取路径,还是像人类一样——手已伸出,大脑才后知后觉?
这个看似简单的动作,背后折射出当前具身智能的困境:算力过剩却反应迟钝,模型庞大却动作笨拙。具身智能机器人被“通用芯片”的枷锁所困。
12月18日,域言栏目开展一期主题为《机器人“缺智”背后,我们需要怎样的大脑芯片?》直播。
本次对话邀请到灵境智源联合创始人/VP须海江和铁云文摘科技自媒体大V薛翔,围绕具身智能机器人的核心硬件——芯片展开深度探讨。嘉宾系统梳理了当前技术瓶颈、演进路径,并对下一阶段的产业趋势作出前瞻性研判。
从左往右依次为:未来机域内容负责人张亚,灵境智源联合创始人/VP须海江,铁云文摘科技自媒体大V薛翔

从“堆算力”到“精算力”行业正经历结构性转向
“我们今年看到整个大模型在朝小、朝精的方向走。去年大家还在设想,到2030年机器人端侧算力可能要达到5000 TOPS甚至10000 TOPS。但今年模型在缩小,算力诉求也在降低——既然无法实现超大算力,那就修正算法、做模型剪枝,把它压下来。” 须海江向未来机域描述了这一趋势。
这一转变标志着行业正从“大模型万能论”回归理性。
过去两年,具身智能普遍依赖“暴力美学”:动辄配置两张英伟达4090或5090显卡,“先求有,再做减法”。而到了2025年下半年,趋势明显转向轻量化。“像Physical Intelligence发布的VLA模型,参数量已经压缩到4B,已经比较小了。”须海江说。
他进一步解释:“VLA本质仍是大模型,穷尽了地球上所有知识,但落地时只是用来打个螺丝。而人不需要学全世界的知识——你开车不用会开所有车型,只要学会手上的这一辆就行。”这种“任务聚焦”思维催生了“快慢脑”架构:快脑负责毫秒级反射动作(如避障、抓取),采用轻量小模型;慢脑处理复杂感知、规划与指令下发,可部署于边缘或云端。
薛翔进一步类比道:“这就像我们在PC上跑一个38B的千问模型,真遇到专业问题,就调用云端大模型——机器人也该如此分层调度。”这种分布式智能范式,不仅降低对单点算力的依赖,也为端侧部署打开可能。同时,行业开始探索类脑智能的新范式。
须海江提到:“最近我们看到很多本体厂商和学术界在提‘类脑模型’,它更加强调垂类、强调本地化。”这意味着机器人不再需要掌握“全人类知识”,而是针对特定任务(如端茶、打螺丝)训练专用能力。这些能力可被封装为“技能包”或“技能库”,实现跨设备复用。“只要本体参数相似,同一品牌的机器人可以直接复制模型——这就像APP下载,未来机器人也能‘装技能’。”
与此同时,芯片设计逻辑也在重构。须海江直言:“目前行业使用的芯片不是为具身智能而生的,而是来自自动驾驶、数据中心等其他领域的通用芯片。它们对机器人而言,很多该有的没有,不需要的却一大堆,功耗还特别高.”
未来,机器人或将拥有专属的“RPU”(Robot Processing Unit),将标准化指令集直接固化,实现极致能效比。
大小脑协同演进:从分离到融合,延迟成核心战场
长期以来,机器人“大脑”(AI决策)与“小脑”(运动控制)因硬件限制被迫分离:AI计算运行在GPU上,而小脑的驱动控制由X86工控机通过EtherCAT或CAN总线下发。
如今,行业正向新趋势演进。自2024年末起,大量厂商将运动控制从X86平台转向ARM SoC(如RK3588)。一方面,该方案可以显著降低功耗和成本;另一方面,以宇数科技为代表的厂商已能在ARM芯片上直接做强化学习推理。
须海江指出:“以前小脑跑X86有一个重要的原因是SLAM算法以前都是在 X86上的,到后面的话逐渐能够把SLAM放到GPU,或者直接放到ARM平台,带一定算力的平台上。X86的需求在下降。”
目前,约30%–40%的新方案已采用ARM方案,仅20%–30%仍沿用X86。
更前沿的趋势是大小脑深度融合。“比如用一颗12核以上的i7 CPU,挂一个GPU做AI调度,同时CPU隔离出4个核专跑EtherCAT做小脑,其余8核处理预处理、业务逻辑等。”须海江介绍。但他也坦言:“对人类来说,眼睛看到危险,神经元直接反射,根本不需要大脑思考。而现在的机器人还要等AI大脑输出结果,再传给小脑执行——整个链路太慢。”
更激进的方向是VA(Vision-Action),直接从视觉到行动,跳过神经网络计算,不需要太多的AI推理,有机会把视觉感知到产生动作做到 50毫秒以内的 50毫秒。
行业进入“务实落地”新阶段
随着技术从实验室走向真实场景,具身智能产业正迈入“落地”的新周期。未来1–3年将呈现三大关键趋势:
第一,应用场景从“炫技”转向“刚需”。
须海江明确指出:“2025年主流场景仍是迎宾导览、教学科研;2026年轮式服务机器人有望在高端酒店、康养中心试点落地。”而双足机器人因安全风险(倒地冲击大,易伤及儿童)短期内难以进入普通家庭。工业领域则聚焦“柔性操作”——如插拔线缆、分拣轻型物料,替代传统AGV无法完成的精细任务。
第二,整机成本成为竞争核心。
“如果你让我花40多万买一个人工智障,打死我也不会买。”薛翔直言。
行业共识是:只有将整机成本压至10万元以内,家用或商用机器人才具备规模化基础。这倒逼全链条降本——从关节模组(当前单价2000–4000元/个)、传感器到主控芯片,均需国产化与专用化突破。
第三,生态协作取代单打独斗。
须海江表示:
“未来会有大量的生态开发者去落具体场景的最后一公里的数据采集及训练,中间态的预训练模型会由大厂来提供,像我们提供的是一些基座型能力,包括从芯片侧,以及基础模型的提供,最后再赋能到千行万业,大家去解决具体的场景的问题。”
机器人不是炫技的玩具,而是解决实际问题的生产力工具。
行业才起步两年,变化却以月为单位发生,这正是中国企业的机会窗口。在这场从通用走向专用、从集中走向分布、从昂贵走向普惠的变革中,具身智能正稳步迈向“可用、好用、用得起”的新阶段。
暂无评论
2026-01-28
2026-01-28
2026-01-27
2026-01-27
2026-01-27
回复评论